

When disaster strikes, search and rescue robots could save lives by finding and retrieving people buried under rubble. But designing robots that can descend rapidly through unstable and uneven rubble has proved to be a considerable technical challenge.
A paper published today in Proceedings of the National Academy of Science shows how the fire ant (Solenopsis invicta), best known for its painful sting and highly invasive habits, can teach engineers how to build fast and agile rescue robots.
A team of physicists and biologists from the Georgia Institute of Technology in the US set out to discover how fire ants move around in their subterranean nests.
The fire ant’s native environment is prone to seasonal flooding, so the ability to rapidly evacuate the nest is a key adaptation. Evacuation of a fire ant nest is not an easy task: nests can be up to 2 metres deep, and can contain a tunnel network totalling more than 50 metres in length.
Many of the tunnels are nearly vertical, which begs the question: how do worker ants manage to rapidly evacuate their nests without falling?
Adaptive ant strides
To investigate the ant’s climbing skills, the team tracked the movement of ants as they climbed up and down glass tubes of different diameters. They also observed ants as they moved through tunnels built in artificial soil.
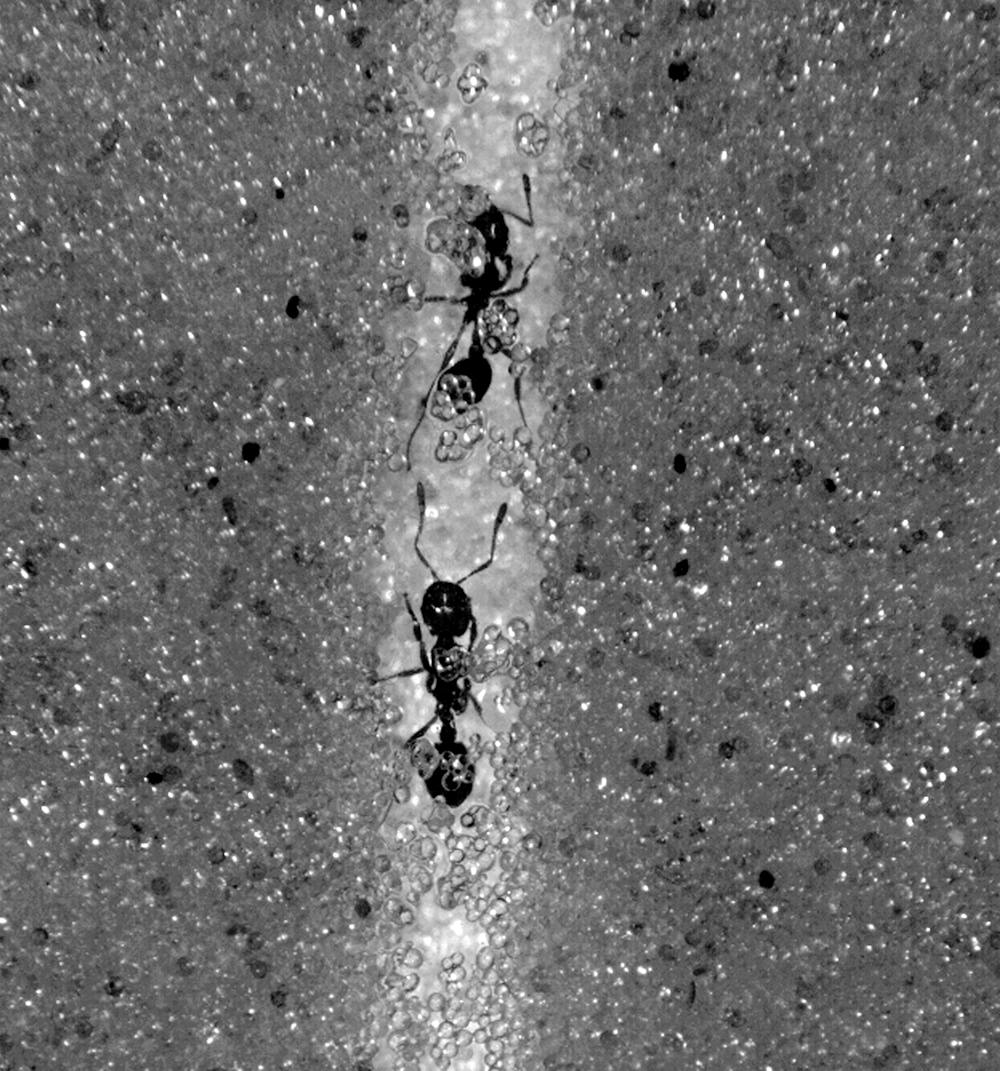
The team discovered that the ants adapted their climbing technique to different tunnel diameters, using a sprawled, wide-legged posture in large tubes and a cramped bent-legged posture in narrow tubes. The ant’s adaptive climbing technique was so effective that tunnel diameter had no influence on how fast ants moved: they were just as quick in narrow tunnels as they were in wide tunnels.
Ants frequently slipped or fell, but they recovered by jamming their long, flexible antennae against the tunnel walls, effectively turning antennae into an extra pair of legs.
Until now, antennae have been primarily thought to specialise in sensory functions such as smell and touch. This research gives antennae an exciting new role in locomotion.
Building better tunnels
The team next turned their attention to the structure of ant-built tunnels.

Since ants were constantly slipping and falling, the team reasoned that fire ants might construct tunnel networks that maximised their ability to recover from slips.
The research team tested the importance of tunnel diameter on falling by subjecting fire ants to a series of strong shakes as they crawled through different sized tunnels. They then measured how far the ants fell before they were able to stop themselves.
Tunnel diameter turned out to be crucial, with ants performing best when the tunnel diameter was similar to the ant’s body length. When ants were allowed to construct tunnels in the laboratory, the research team found that ants built tunnels with optimal diameter for fall-stopping.
The researchers suggest that the fire ants’ nest is constructed so that the ant is able to recover from slips and falls in the tunnels.
In fact, fire ants seem to use falls to their advantage and can quickly descend into the nest using a series of controlled “micro falls”.
Helping the rescuers
So how does research on fire ant movement inform the design of better robot-rescuers?
Engineers could build robots that mimic the fire ant’s adaptable body posture, allowing them to move quickly through a range of spaces. This is important when searching for people in confined spaces that can vary in size.
Robots could also use the fire ant’s method of controlled micro-falls to descend rapidly into wreckage.
Despite their nasty reputation, fire ants might ultimately help save human lives by showing engineers how to design better, faster search and rescue robots.