

Qui observe le vol des libellules, essaye d’attraper une mouche ou admire le vol des papillons dans son jardin, reste fasciné par les extraordinaires performances de vol des insectes, que l’on commence seulement à comprendre et qui reste mystérieux sur bien des points. Le battement des ailes de l’insecte crée une turbulence qui le maintient en l’air, à l’image d’un surfeur qui créerait sa propre vague.
Pour l’étudier, les chercheurs peuvent avoir recours à des dispositifs expérimentaux où l’insecte est observé « de loin » : cependant, à cette distance de quelques mètres, on ne perçoit que sa position, et non la configuration de ses ailes ou de son corps… Une autre approche consiste à placer l’insecte dans un simulateur, fixé sur une tige, ou encore à attendre qu’il se place en vol stationnaire au-dessus d’une fleur, dans le champ de la caméra. Difficile de trouver le bon compromis entre la liberté d’évolution du sujet et la proximité de la caméra (ou, autrement dit, le niveau de détail des images).
C’est ce qui nous a motivés à développer le premier robot-laboratoire suspendu et actionné par des câbles, capable de suivre et d’interagir avec un insecte libre de ses mouvements.
À l’origine de ces recherches, il y a l’étude de l’olfaction des insectes : les chercheurs se sont notamment questionnés sur le lien entre la perception d’une odeur (par exemple une phéromone sexuelle) et le vol permettant de s’en approcher. Typiquement, on place une source olfactive dans un tunnel de vol, puis on observe les trajectoires des insectes qui volent à proximité. Mais comment savoir (ou contrôler) précisément où se trouvent les molécules olfactives ? De ce constat est née l’idée de concevoir un laboratoire mobile, capable de stimuler et d’observer l’insecte étudié, tout en se déplaçant pour le suivre dans son vol. L’insecte peut ainsi évoluer sans restriction, et être observé de près. C’est sur le principe assez proche de la caméra « spider-cam », déjà utilisée dans les stades, pour filmer au plus près footballeurs ou rugbymen.
Cibler l’insecte…
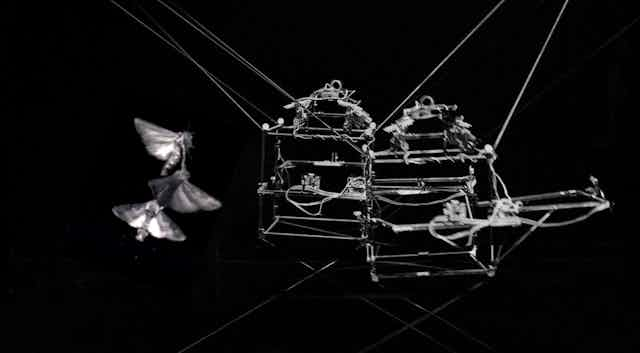
Comme la spider-cam, le dispositif « laboratoire sur câbles » est entraîné par des câbles, que déroulent ou enroulent des moteurs performants (rapide et mesurant la longueur du câble avec précision, mais surtout capables de changer rapidement de vitesse), placés aux huit coins de la pièce. Sur la nacelle mobile – un cube de 30 centimètres de côté en fibre de carbone : deux caméras pour détecter la position de l’insecte, une caméra haute vitesse pour capturer finement ses mouvements (à 600 images par secondes, ce qui est suffisant pour un insecte effectuant une trentaine de battements par seconde), sans oublier une batterie et un système de communication radio : impossible d’être relié par des fils, le système embarqué doit être autonome !

Lors du vol, la nacelle est guidée un peu à la manière d’un missile à tête chercheuse : elle aligne sa vitesse sur celle de l’insecte, tout en y ajoutant une composante permettant de s’en approcher petit à petit. Et comme la trajectoire de l’insecte change vite, ces calculs se répètent à chaque centième de seconde.
Les mesures de la position de l’insecte sont effectuées directement sur la nacelle, puis télétransmises vers l’ordinateur commandant les enrouleurs des câbles. Là, grâce à un modèle de la géométrie du robot, la consigne de déplacement de la nacelle est ensuite retranscrite sur chaque câble, afin d’obtenir les vitesses d’enroulement à appliquer. La difficulté à cette étape, c’est que cette retranscription dépend de la position de la nacelle : deux déplacements identiques réalisés lorsqu’elle se trouve au centre ou dans un coin de l’enceinte auront deux enroulements différents.
Maintenir la tension !
Trop de tension : le câble casse ; pas assez : l’enroulement se fait mal et le câble s’emmêle. Maintenir la bonne tension dans chaque câble est donc capital, d’autant plus qu’on ne connaît la distance entre la nacelle et un enrouleur que si son câble est tendu ; et donc impossible de déterminer la position de la nacelle si ce n’est pas le cas.
La tension d’un câble dépend de son propre enrouleur… mais aussi de la tension dans les sept autres câbles !
Il faut donc ajuster simultanément la consigne de tous les enrouleurs. Cet ajustement est rendu possible par le nombre de câbles : en effet, un déplacement peut s’effectuer avec divers paramètres de tension ; ce qui compte c’est le résultat de la somme des tensions. Pour simplifier, on peut augmenter la tension dans le câble d’un côté, à condition d’augmenter à valeur égale la tension dans les câbles de l’autre côté.
Des challenges inattendus : détection et décollage

Savoir se déplacer rapidement est nécessaire pour suivre l’insecte, mais encore faut-il connaître sa position ! La détection de l’insecte reste l’un des points cruciaux pour le suivi. Le sujet est éclairé par des LED infrarouges – qu’il ne peut pas percevoir – et filmé par deux caméras miniaturisées. Sous l’œil des caméras, le papillon n’est qu’une petite tache blanche, impossible à distinguer d’un reflet de l’éclairage sur l’une des tiges de la nacelle… La peinture noir matte a donc été de rigueur ! Grâce à elle, les reflets sur les tiges, les attaches des câbles, etc. sont suffisamment réduits.
Un second problème inattendu a été le contrôle du décollage de l’insecte : impossible en effet de savoir précisément à quel moment l’insecte va se décider à déployer ses ailes ! Attendre un décollage spontané posait le problème de la capacité (mémoire et batterie) de la caméra rapide. Nous avons envisagé et testé divers moyens pour déclencher le décollage : de la catapulte à la stimulation électrique, mais la solution retenue est un léger chauffage de la plate-forme qui – sans blesser l’insecte – crée suffisamment d’inconfort pour accélérer le décollage.
Vol libre du papillon
Le laboratoire sur câble a permis de suivre et d’étudier le vol libre du papillon de nuit Agrotis ipsilon (environ 2 cm de long). Celui-ci peut voler jusqu’à 3 mètres/seconde, et il est capable de brusques changements de vitesse et de direction (jusque 2 g d’accélération). C’est un bon sujet d’étude, car ce papillon de nuit bat des ailes plus lentement que d’autres insectes, ce qui facilite la décomposition de leur mouvement.
À l’avenir, notre système pourra servir de sujet d’expérience sur la perception des odeurs, puisque le mâle, pour se reproduire, utilise son système olfactif très développé pour localiser la femelle, guidé par les phéromones qu’elle émet.
Une porte ouverte vers d’autres études
Le robot n’est pas une fin en soi, mais un outil de recherche supplémentaire pour comprendre la mécanique du vol d’autres espèces (comme la drosophile, le moustique, etc.). La nacelle peut accueillir de nouveaux équipements, par exemple pour émettre des bouffées odorantes et observer la réaction de l’insecte, voire mesurer son activité musculaire !
Il est aussi possible d’agrandir le robot, sa zone d’évolution n’étant a priori limitée que par la longueur des câbles ; on peut même envisager de l’installer en extérieur.
En perspective, nous espérons que le laboratoire sur câble permettra d’affiner et d’approfondir les modèles du vol des insectes, ouvrant de nouvelles voies pour le développement des mini-robots volants qui s’en inspirent, par exemple le RoboFly ou le RoboBee.