

Teaching a robot to walk – even poorly – requires huge investment into computational resources. How is it that even the simplest animals are able to achieve far more sophisticated feats of manoeuvrability?
In a paper published today in the Proceedings of the National Academy of Sciences (PNAS), cross-disciplinary researchers have taken a major step forward in answering this question.
Perhaps surprisingly, a feature of many animals’ movement is that substantial forces are produced in directions other than those necessary for the animal to move through its environment. Some of these are perpendicular (or even opposite!) to the direction of travel.
This paper demonstrates how these so-called “antagonistic” (or mutually opposing) movements are the secret underlying nature’s ability to eliminate the trade-off between manoeuvrability and stability.
A pain in the bass
Researchers from the fields of robotics, biology and computational modelling have been collaborating to explain how animals can execute incredible feats of manoeuvrability with little-to-no conscious effort.
Anyone who has witnessed a game of robot soccer will realise that humanoid robots are far from graceful in their attempts at walking – check out the video below.
This problem becomes more prominent as the size of robots increase, with the adult-sized RoboCup league still requiring human handlers to prevent the robots from falling. Aside from the obvious limitations of large robots requiring large motors, struggles arise in both stages of “teaching” a robot to walk:
- The walk engine: a kinematic model must be derived for the robot, with corresponding systems to dynamically control balance as the robot walks. Although many of these models are derived from simple ideas (such as the commonplace inverted pendulum model), their implementation is complex and parametrised by dozens of different values.
- Parameter optimisation: a typical bipedal robot walk engine may contain in excess of 50 individual parameters, representing both physical properties (such as stance height, step length) and more abstract feedback controller values.
Both of these components is the focus of much research, with the latter posing such a complex task that it has motivated the development of speciality optimisation algorithms.
Sofishticated movement
As the mutually opposing forces exhibited during an animals’ movement effectively “cancel out” over each gait cycle, they are difficult to observe and their role has previously remained a mystery.
Although clearly not contributing directly to the animals’ movement, today’s PNAS paper demonstrates that these forces play the equally important role of simplifying and enhancing the actual control of locomotion.
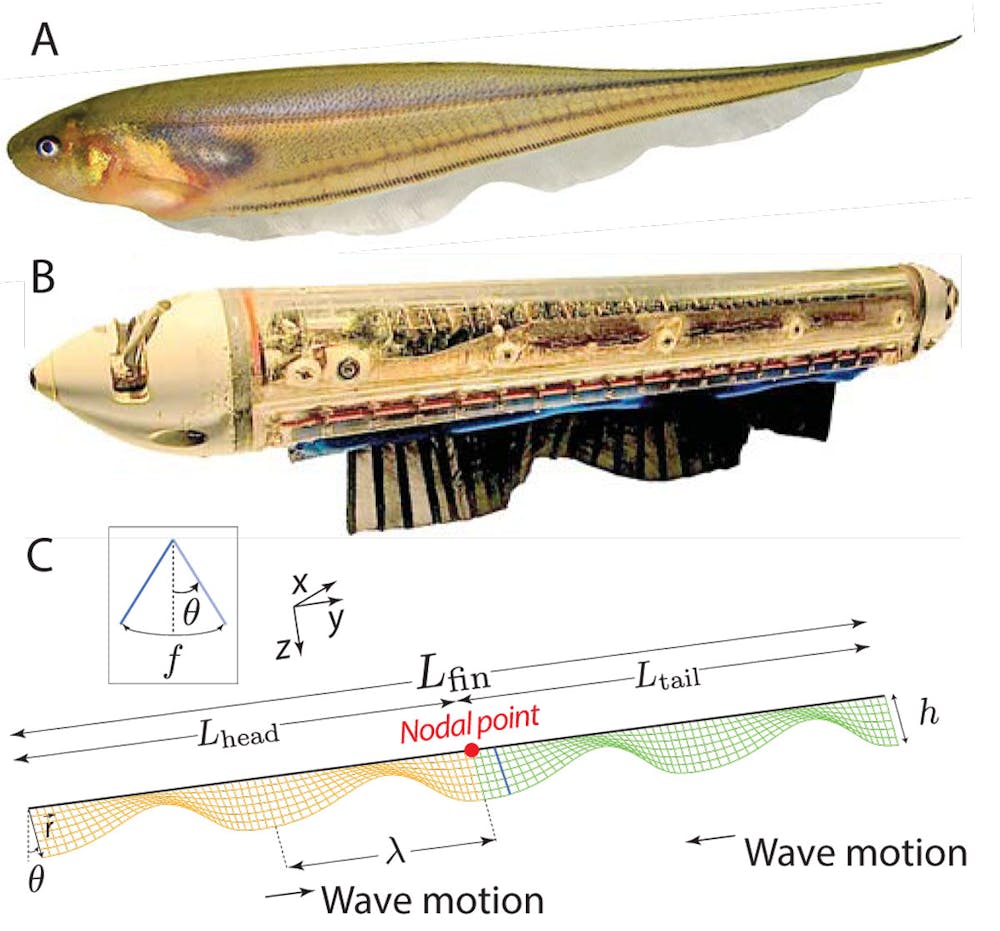
This relationship was investigated by studying the movement of the glass knifefish (Eigenmannia virescens), which produces mutually opposing forces during a “hovering” behaviour similar to a hummingbird feeding from a moving flower.
In principle, the glass knifefish could adopt a simple locomotion strategy of moving its fin in one direction or another. However, for some additional energetic cost, the fish instead adopts a strategy that relies on mutually opposing forces to stabilise using feedback control of counter-propagating waves.
These waves offer two major advantages over simpler strategies:
- they passively reject perturbations (resulting in increased passive stability)
- they require considerably less control effort (increased manoeuvrability).
This elimination of the trade-off between manoeuvrability and stability, discovered in measurements of the knifefish, was later confirmed using computational models and experimentation with biomimetic robot (shown in the figure above).
In addition to challenging the manoeuvrability-stability dichotomy within biological locomotion, this research challenges the same trade-off within the engineering of mobile robots.
Evidence suggests that the very design of [animal morphology](http://en.wikipedia.org/wiki/Morphology_(biology%29) facilitates control, thereby reducing the number of physical parameters that must be managed by the nervous system. With further research and modelling of how animals utilise mutually opposing forces, future generations of robots may equivalently require significantly fewer parameters to control.
This dimensionality reduction would improve the tractability of tuning these parameters to their optimal values, resulting in further improvement in the performance of robot locomotion.
Fin.