
Con los recientes avances de la tecnología, la posibilidad de que los robots convivan y desarrollen su actividad entre las personas está cada vez más cerca. No solo se ocupan de muchas de las tareas mecánicas que hasta hace poco eran patrimonio exclusivo de los humanos. En muchos casos, también son capaces de reproducir y copiar nuestro comportamiento.
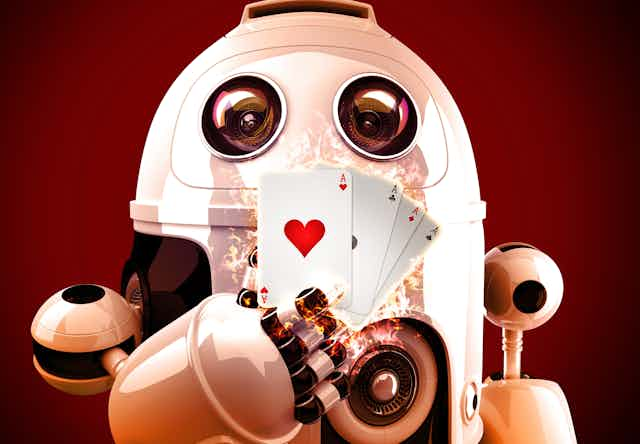
¿Pero hasta qué punto? ¿Podrían, por ejemplo, desarrollar algún tipo de trastorno, enfermedad o dependencia? Pensemos en la ludopatía, una enfermedad que se caracteriza por un fracaso crónico y progresivo en resistir los impulsos de jugar apostando dinero. ¿Sería un robot capaz de experimentar (y resistir) esos impulsos?
Inteligencia artificial clásica vs. generativa
En la inteligencia artificial clásica, los modelos tradicionales realizan una función a partir de unas entradas y salidas conocidas, asociada a una información suministrada. Por ejemplo, cuando un usuario configura el termostato de un aire acondicionado para mantener una habitación a una temperatura de 24 ºC, éste utiliza entradas y salidas simples: detecta la temperatura actual, activa el aire mientras es más alta de la deseada y lo desactiva cuando llega a 24 ºC.
Los diferentes algoritmos y técnicas –redes neuronales, fuzzy logic, algoritmos genéticos o el machine learning– fomentan el aprendizaje autónomo de las máquinas sin necesidad de ser programadas expresamente para ello, pero con respuestas previsibles dentro un abanico de posibles soluciones.
Con la llegada de la inteligencia artificial generativa ) se nos plantea un debate mucho más profundo. Ahora los datos de entrada son instrucciones para completar comandos y –aquí es donde la cuestión toma una dimensión sin igual– las salidas son… ¡desconocidas! Y, por tanto, difíciles de controlar. Entrenamos a modelos probabilísticos y mucho más complejos que el termostato, modelos capaces de generar datos nuevos similares a otro conjunto de datos.
Los grandes modelos lingüísticos que impulsan estos avances en la IA generativa son un punto de inflexión significativo. No solo han descifrado la complejidad del lenguaje permitiendo que las máquinas aprendan el contexto, deduzcan la intención y sean creativas de forma independiente. También se puedan reajustar rápidamente para una amplia gama de tareas.
Volviendo al asunto de la ludopatía, si el aprendizaje del robot depende de un asistente ChatGPT integrado y le pregunta sobre la ludopatía, éste puede explicarle que se caracteriza por la incapacidad de controlar los impulsos de apostar dinero, a pesar de las consecuencias negativas para la vida del individuo. Pero también podría dar una respuesta del tipo: “Sigue jugando, que ganarás mucho dinero”.
En este último caso, ¿cómo actuaría el robot? ¿Se terminaría convirtiendo en ludópata?
Aprendizaje por refuerzo, todo un reto
La robótica actual pone todo su empeño en disponer de robots adaptables, capaces de aprender del entorno y de la propia experiencia. Este aprendizaje se debe mantener durante toda la vida del robot. Los errores y aciertos del robot deben permitir que este pueda modificar su comportamiento futuro.
En este sentido, lo ideal es el aprendizaje por refuerzo, en la medida en que permite que un robot aprenda sin más información que un refuerzo extrínseco que indica cuando las acciones realizadas son correctas o no. De esta forma, unas ganancias iniciales le empujarían a seguir apostando, pero al no perder de vista que una retirada a tiempo es una victoria, podría abandonar tras perder, por ejemplo, en dos partidas consecutivas.
Los algoritmos tradicionales de aprendizaje por refuerzo se limitan a comportamientos reactivos simples y rara vez se aplican al aprendizaje directo en robots moviéndose en entornos reales. De hecho, el aprendizaje por refuerzo suele ser lento y exige un proceso de exploración costoso.
Por otra parte, el tiempo de aprendizaje se incrementa de forma exponencial con el número de estados (situaciones significativamente diferentes) que puede encontrar el robot.
Podemos ilustrarlo con un ejemplo sencillo. Supongamos que el robot debe aprender a cruzar una intersección en una ciudad. En una intersección típica, puede haber varias combinaciones posibles de señales de tráfico, diferentes flujos de tráfico de otros vehículos y peatones, y diversas condiciones climáticas.
Si solo hay dos estados posibles en la intersección (por ejemplo, semáforo en verde o en rojo), el robot podría aprender relativamente rápido, tal vez en unas pocas horas de entrenamiento.
Sin embargo, si el número de estados posibles aumenta a diez (por ejemplo, semáforos en verde, amarillo y rojo, pero también diferentes semáforos apagados, diferentes flujos de tráfico, peatones, etc.), el robot requerirá más tiempo para aprender a comportarse adecuadamente en todas estas situaciones. Si se le suman interacciones inesperadas y eventos imprevistos (bicis que cruzan, niños que corren detrás de una pelota…), el tiempo de aprendizaje del robot se incrementará de forma exponencial.
El tiempo de aprendizaje se incrementa exponencialmente porque el robot necesita acumular una gran cantidad de ejemplos de cada estado para poder generalizar y tomar decisiones precisas en situaciones similares.
Convivir sin comportamientos indeseables
Estamos en un contexto en el que la convivencia entre humanos y robots va a tener más sentido que nunca. Sin ir más lejos, para el acompañamiento de personas mayores o dependientes. Si el aprendizaje y, por tanto, el comportamiento del robot solo está en manos de su asistente tipo ChatGPT sin supervisión alguna), y dado que la información que proporcionan estos sistemas no siempre se ajusta a la realidad, en muchos casos puede conducir a que el robot acepte comportamientos indeseables. Como adicciones o delitos.
El aprendizaje en humanos comienza con percepciones, emociones, sensaciones y movimientos obtenidos del mundo que nos rodea, en ambientes donde podemos explorar. Por tanto, el aprendizaje del robot no puede estar basado solo en un único canal de información: debe apoyarse en un compendio de herramientas que se supervisen a sí mismas, de forma que siempre se garantice que la información se ajusta a la realidad y que no lleva al robot a ser víctima de adicciones o enfermedades mentales.
De otro modo, la deriva hacia un mundo donde nada es lo que parece nos llevaría a un futuro demasiado oscuro.