

Mise à jour du 27 avril: Le 25 avril dernier, après un voyage de presque cinq mois, la sonde Hakuto-R de la société privée japonaise ispace a entamé sa descente vers la surface lunaire. Durant la manœuvre, les ingénieurs d’ispace ont constaté un niveau de carburant très faible et le contact avec la sonde a été perdu. Les premières analyses concluent à une chute libre de la sonde et un atterrissage violent.
La mission Hakuto-R doit atterrir sur la Lune le 25 avril 2023. Cette mission est une grande première à plusieurs égards. Le premier rover émirati, nommé Rashid, doit alunir grâce à un atterrisseur japonais réalisé par la société privée ispace, qui a été lancé vers la Lune le 11 décembre 2022 à l’aide d’une fusée Falcon 9 de SpaceX. Cette mission est donc un nouvel exemple de partenariat public-privé qui est au cœur de la philosophie moderne des missions spatiales, le « new space ». À travers Hakuto-R, c’est aussi une nation qui affirme ainsi sa présence dans l’espace, les Émirats arabes unis.

{kind=link}
En cas de succès, cette mission serait la première où une société privée se pose sur un corps céleste. Seules des agences comme la NASA, l’agence spatiale russe Roscosmos ou l’ agence spatiale chinoise CNSA se sont posées sur la Lune et Mars. Les enjeux de la mission Hakuto-R sont donc immenses du point de vue commercial : il s’agit de valider la preuve de concept de l’alunissage privé et de l’utilisation de nombreuses technologies commerciales de pointe.
Pour la France, il s’agit d’un grand retour sur la Lune : les caméras CASPEX sont les premiers instruments français envoyés sur la Lune depuis 50 ans.
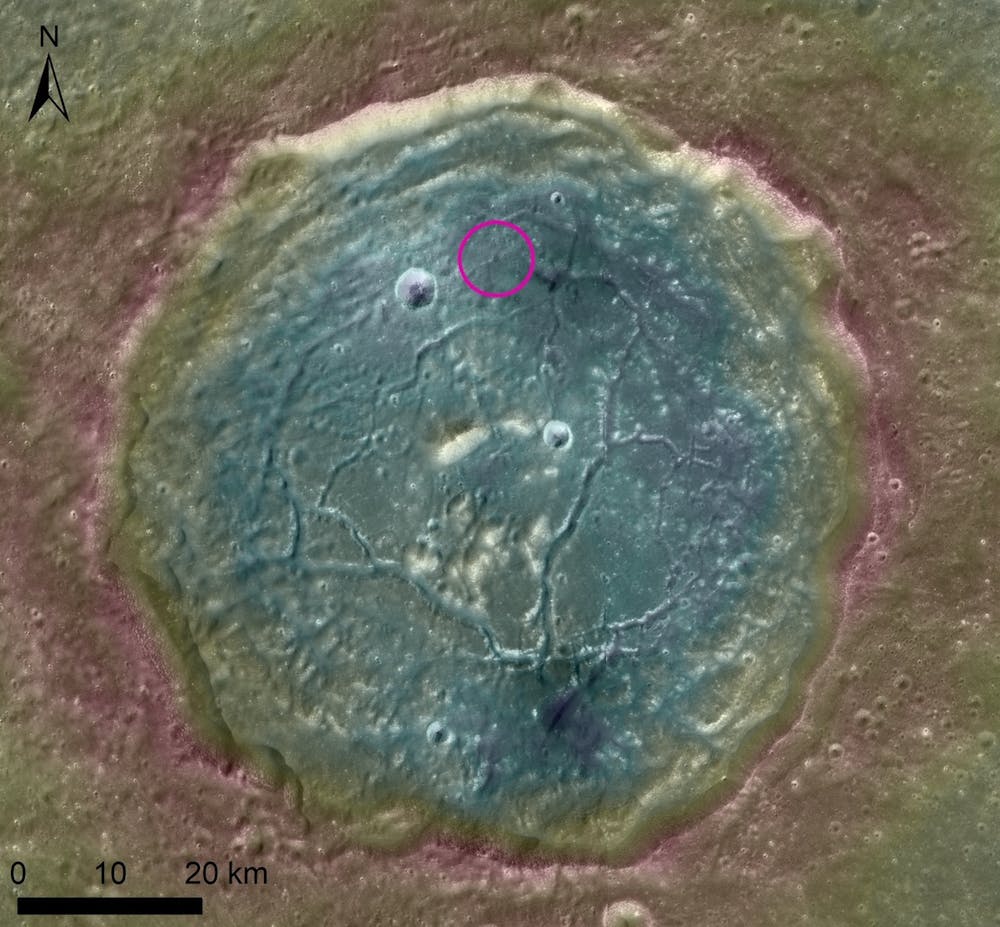
L’enjeu scientifique est également majeur : Rashid va évoluer sur la surface de la lune dans le cratère Atlas, avec de nombreux instruments permettant une analyse géologique et minéralogique extrêmement précise.
Enfin, l’atterrisseur Hakuto-R va également déposer sur le sol lunaire Sora-Q, un petit robot transformable ovale de 250 grammes et 8 centimètres de long, qui dispose d’une caméra et peut se déplacer avec des extrémités qui peuvent servir de roues.
Les Émirats arabes unis dans l’espace
Peu de pays sont présents sur la Lune – les Émirats arabes unis pourraient bientôt faire partie des quelques nations sur le sol lunaire. Mais le pays a déjà une présence dans l’espace assez affirmée et une industrie spatiale forte.
Leur mission phare orbite autour de Mars : il s’agit de « Hope », qui est arrivée autour de la planète rouge en même temps que la très médiatisée mission américaine Mars2020 – qui a déposé le rover Perseverance et que la mission chinoise Tianwen-1. Hope est, elle, restée en orbite autour de la planète Mars, où elle étudie son atmosphère et comment l’oxygène et l’hydrogène s’en échappent vers l’espace.
Read more: À qui appartiennent Mars, la Lune et leurs ressources naturelles ?
Autour de la Terre cette fois, les Émirats arabes unis ont plusieurs satellites en orbite basse, qui permettent d’observer la Terre en haute résolution – de ce point de vue, ils ont réussi à développer en une vingtaine d’années des systèmes quasiment aussi perfectionnés que les systèmes français. La politique spatiale émirati embrasse les 100 prochaines années, contrairement à celles d’autres pays qui envisagent des échelles de temps beaucoup plus courtes (une vingtaine d’années pou le programme Artemis de la NASA).
Les missions scientifiques du rover Rashid
Côté Lune, les Émirats se préparent aujourd’hui à alunir grâce à une collaboration exemplaire du new space. Leur rover Rashid, développé au Mohammed Bin Rashid Space Centre, fait 70 centimètres de haut (mât déployé) et 50 centimètres de côté et contient plusieurs instruments scientifiques.
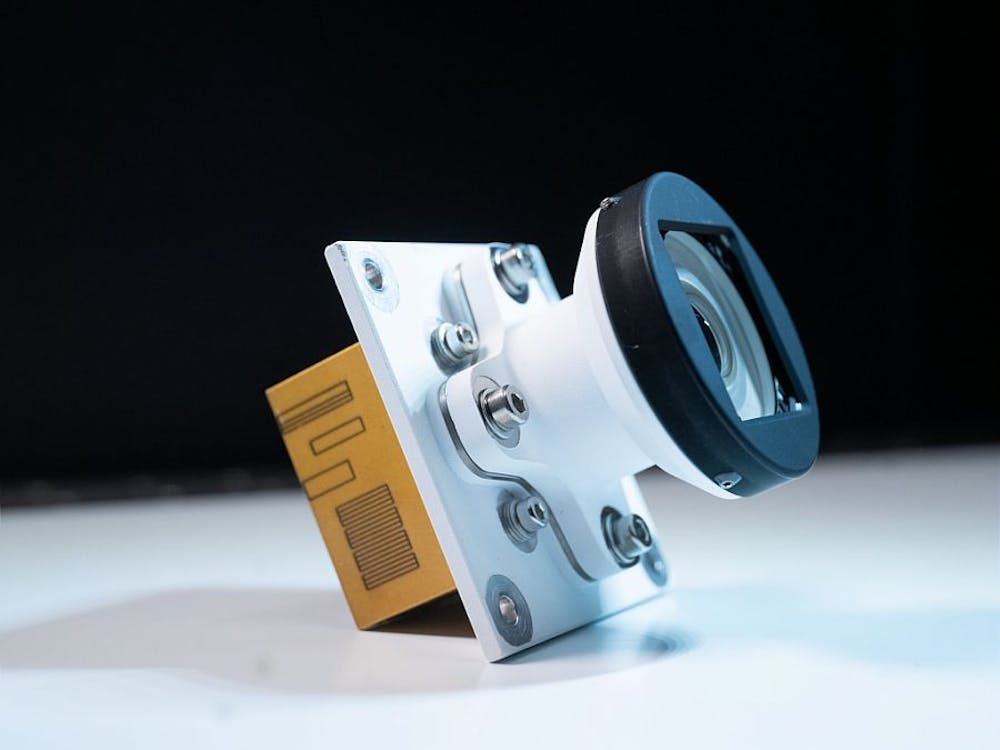
Tout d’abord, trois caméras « CASPEX » développées en France, permettant d’obtenir des images de haute résolution (full HD) qui vont imager la texture du sol lunaire (le « régolithe »). L’une d’elles est équipée d’un microscope de moins de 100 micromètres de résolution, et les trois caméras verront le sol en couleur, dans les longueurs d’onde visibles, fournissant des briques d’informations spectrales à une distance d’un mètre seulement.
Ensuite, Rashid contient une caméra infrarouge pour l’imagerie thermique : il s’agit d’imager la température du sol est ses variations pour mieux comprendre les inhomogénéités de températures dans le cratère Atlas.
Il s’agit ensuite d’étudier les poussières lunaires qui décollent de la surface à cause du vent solaire et des rayonnements électromagnétiques – un phénomène appelé « décollement électrostatique » qui a affecté les missions Apollo car la poussière lunaire s’infiltre partout. Des « sondes de Langmuir », ou sondes électrostatiques, vont mesurer donc la densité électronique du plasma qui provoque le décollement de ces poussières.
Enfin, des polymères sont attachés aux roues du rover. Le régolithe lunaire doit adhérer à ces « pneus », ce qui permettra de l’analyser plus en détail grâce aux caméras.
La mission de Rashid est une mission éphémère. En effet, une journée lunaire dure 14 jours terrestres, suivis de 14 jours pendant lesquels il fait nuit, et on n’est pas sûrs que les instruments se « réveilleront » après avoir été privés d’énergie solaire pendant deux de nos semaines terrestres.
La mission est coordination au sol par le Mohammed Bin Rashid Space Centre, d’où des scientifiques, notamment français, travailleront avec des ingénieurs pour sélectionner les terrains géologiques à étudier. De son côté, le centre d’opération du CNES à Toulouse a mis en place un « segment sol » pour la mission afin de traiter des images du rover, permettant aux experts qualité image de calibrer les images pour fournir des données optimisées à la communauté scientifique.
Trois caméras françaises sur le rover émirati, l’histoire d’une rupture technologique de l’imagerie spatiale
Au début des années 2000, le CNES constate que la technologie phare des capteurs d’images utilisée pour les missions d’imagerie spatiale, les charge coupled devices (CCD), devient de moins en moins pérenne face à la montée des capteurs d’images CMOS qui ont aujourd’hui envahi le marché commercial (smartphone, vision industrielle et automotive). L’avantage de la technologie CMOS réside dans sa miniaturisation, leur faible consommation électrique et la possibilité d’ajouter des fonctions de traitement avancées en périphérie des pixels.
Pour qualifier la technologie CMOS en environnement spatial, de nombreuses années de test ont été nécessaire. Une à une les étapes sont validées et les capteurs d’images CMOS s’imposent pour les futures missions spatiales. En 2014, les scientifiques sont convaincus est soutiennent le CNES dans la réalisation de caméras génériques et très intégrées utilisant les capteurs d’images CMOS. En moins de trois ans, une nouvelle génération de caméras voit le jour, du prototype jusqu’au modèle de vol. C’est la naissance de CASPEX : CAmera for SPace EXploration.
Cette caméra équipe l’instrument optique du premier nanosatellite du CNES, Eyesat, lancé fin 2019.
L’instrument SuperCam du rover Perseverance de la NASA est aussi équipé d’une caméra CASPEX à base de capteurs CMOS. Et avec Rashid, CASPEX pourrait bientôt être la première caméra française à prendre des clichés de haute résolution sur la Lune.
Vers 2024, la mission franco-germano-japonaise MMX va partir pour chercher à se poser sur l’une des lunes de Mars, Phobos. Son rover sera équipé de quatre caméras CASPEX, deux caméras pour la navigation par stéréovision et deux autres pour scruter le sol.
Enfin, des versions multispectrales (avec 9 et 25 canaux de couleur) équiperont le futur rover Rashid2 qui devrait aller sur la Lune en 2025. Une nouvelle version de CASPEX avec un capteur 4K est également en cours de développement aujourd’hui et une version infrarouge de CASPEX verra même le jour en 2023 pour équiper de futures missions spatiales.